
祝贺实验室两篇论文被机器人领域顶级旗舰会议IROS2025录用
Development of a Novel Miniaturized Dexterous Manipulator with Variable Stiffness for NOTES
经自然腔道手术(NOTES)因其能够避免体表切口、减少组织创伤并缩短术后恢复周期而具有广阔的应用前景。然而,现有手术器械难以同时兼顾尺寸小型化、操作灵巧性和负载能力,限制了NOTES技术的临床应用。为提升NOTES手术的操作灵活性,课题组研发了一款具有5毫米直径、7自由度的新型经自然腔道手术执行器。相关成果以“Development of a Novel Miniaturized Dexterous Manipulator with Variable Stiffness for NOTES”为题,被机器人领域顶会IROS 2025接收。
论文作者:丛榕,武锡彭,钱超,张凯捷,段星光,李长胜*
该款手术执行器通过融合类3-PRS柔性并联机构与连续体并联结构,在小尺寸下实现了高灵巧性和可变刚度。在结构设计方面,我们采用“钢管-镍钛绳-钢管”的柔性组合代替传统3-PRS机构中的刚性支链,该结构既可实现类球铰运动,同时可以通过调节镍钛绳的张力实现可变刚度。在传动设计方面,我们基于鲍登线(Bowden-cable)原理实现柔性管道内远距离动力传输,并将镍钛绳驱动端与弹簧相连,可通过调节弹簧张力实现对变刚度的调节。

图1:柔性并联手术机器人。(a)手术机器人整体机构示意图;(b) 柔性并联手术执行器;(c)柔性传输管;(d)驱动机构
基于新型机构运动特性与变刚度特性,我们建立机构的运动学模型,并基于LM算法求解逆运动学,同时建立机构静力学模型,得到机构的刚度表达式。
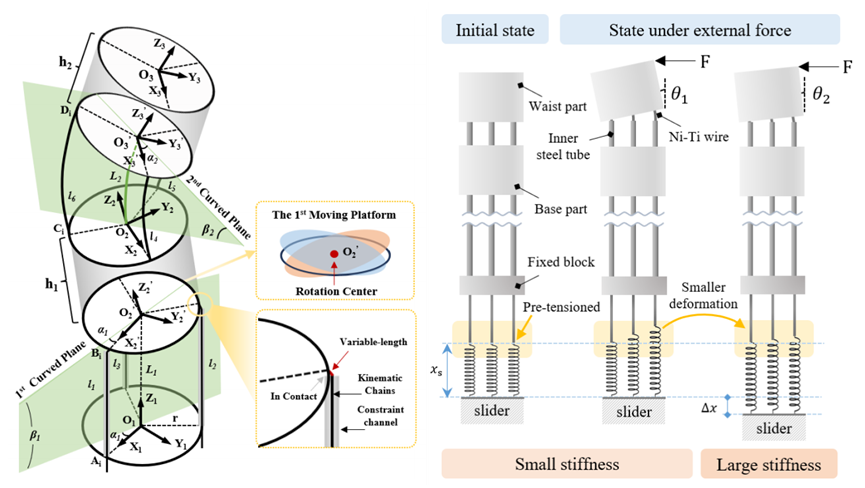
图2:(左)机构运动学模型;(右) 机构刚度模型
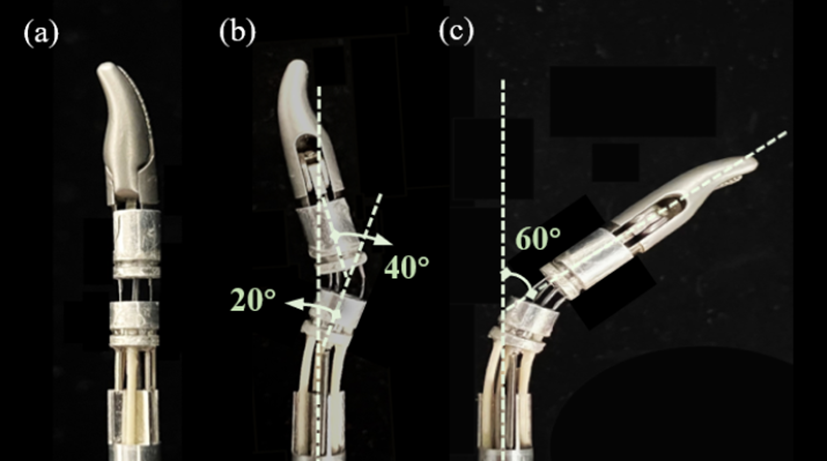
基于研发的新型手术执行器,我们进行了相关性能实验,包括弯曲性能测试:可实现C型弯曲和S型弯曲,最大弯曲角度达60°。
变刚度性能测试:通过改变变刚度驱动结构的弹簧伸长量,改变第一级机构刚度,变刚度比值达1.84。
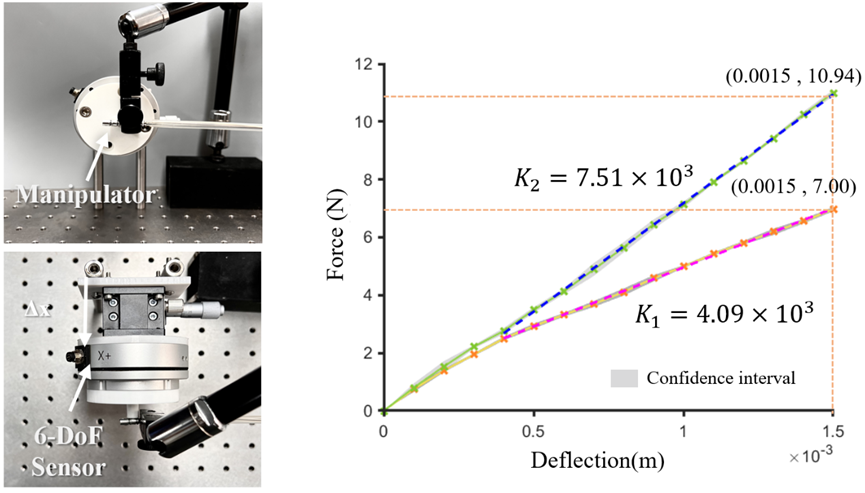
图4:变刚度性能测试
套环实验:模拟验证了该机构在指定场景下的实用性和灵巧性。
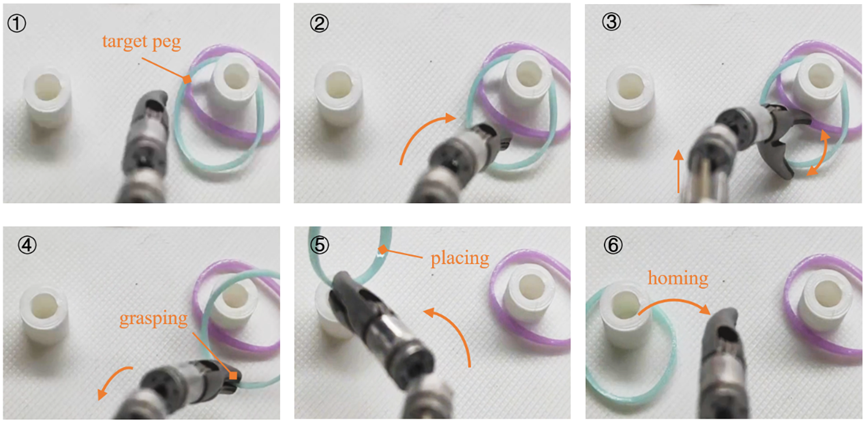
图5:套环实验
Fast Real-Time Neural Network-Based Kinematics Solving of the Cosserat Rod Model for a Parallel Continuum Surgical Manipulator
在微创外科手术中,柔性操作器需要兼具 小尺寸、高精度与实时响应能力。然而,传统基于常曲率假设的运动学模型难以准确描述复杂的弯曲行为,导致控制精度不足。为此,课题组针对平行柔性连续体手术操作器,提出了一种结合 Cosserat杆理论与神经网络的快速逆运动学求解方法。相关成果以“Fast Real-Time Neural Network-Based Kinematics Solving of the Cosserat Rod Model for a Parallel Continuum Surgical Manipulator” 为题,被机器人领域顶会 IROS 2025 接收。
论文作者:武锡彭,钱超,刁金鹏,段星光,李长胜*
本文提出一种新型柔性并联手术执行器,其直径仅 4.5 mm,内部留有 2.1 mm 通道,可搭载手术器械。其驱动结构采用鲍登线原理传递动力,三对镍钛合金杆以交叉方式布置,既保证了结构刚度,又提升了柔顺性。基于该执行器的运动特性,我们采用了基于Cosserat rod理论的运动学建模方法,其能够精确描述大曲率下的复杂耦合变形,显著优于常曲率模型。
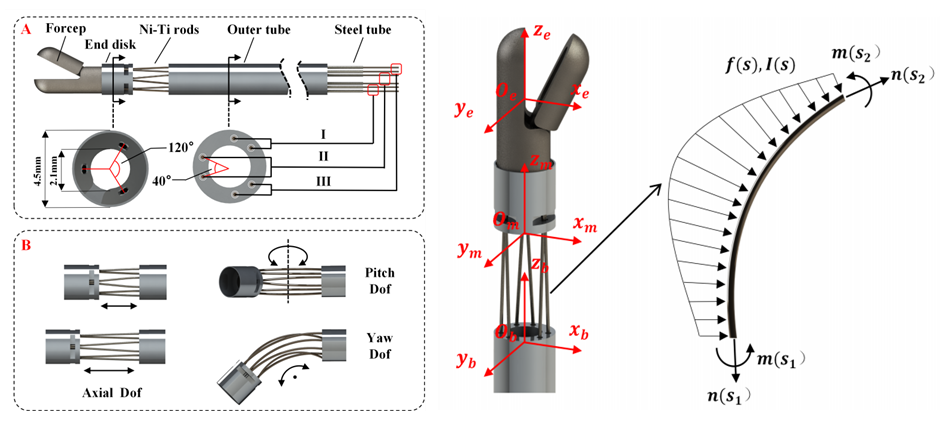
图1:(左)新型柔性并联机构;(右)基于cosserat rod理论的运动学建模
由于Cosserat rod模型求解需要通过复杂的数值求解过程,求解效率较低,我们将神经网络方法与Cosserat rod模型结合,通过采集5000 组仿真数据训练MLP神经网络得到快速逆运动学求解器。
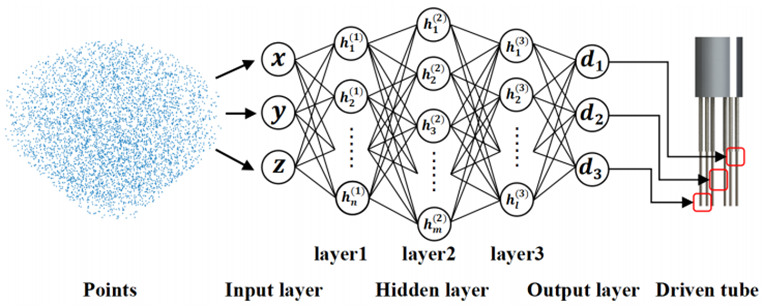
图2:基于MLP神经网络的逆运动学求解器
实验结果表明,该方法在求解过程中的预测平均误差仅 0.046 mm (0.41%),且在 CPU-only环境下推理速度0.16 ms,较传统数值解法快4500–20000倍。
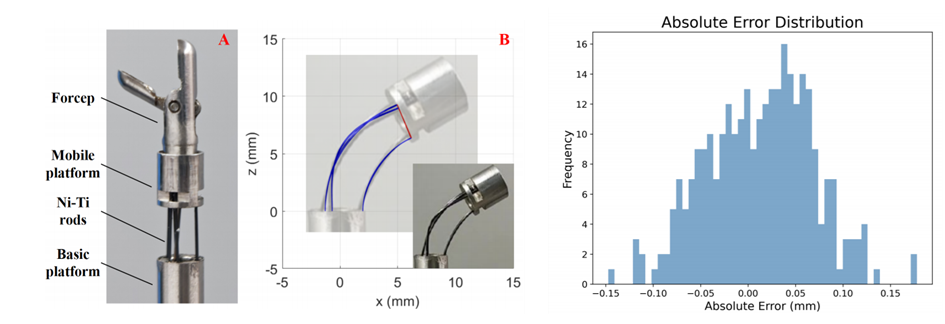
图3:(左)执行器实际运动效果与预测结果对比;(右)神经网络求解器预测误差