
机械臂动态跟踪中的输出有限约束控制与复合去饱和策略研究
针对输入饱和现象下传统约束控制策略存在的问题与不足,课题组设计了一种顺应输入饱和的全局障碍李雅普诺夫函数(GBLF)及其输出有限约束控制框架,并提出一种复合去饱和控制策略,能够显著改善机械臂在极端饱和下的瞬态表现。在Kollmorgen机械臂上的实物实验验证了所提策略的有效性和优越性。相关成果在线发表于《IEEE/ASME TRANSACTIONS ON MECHATRONICS》。

作者信息:石青鑫博士、何睿博士、李长胜副教授、崔腾飞博士后、段星光教授
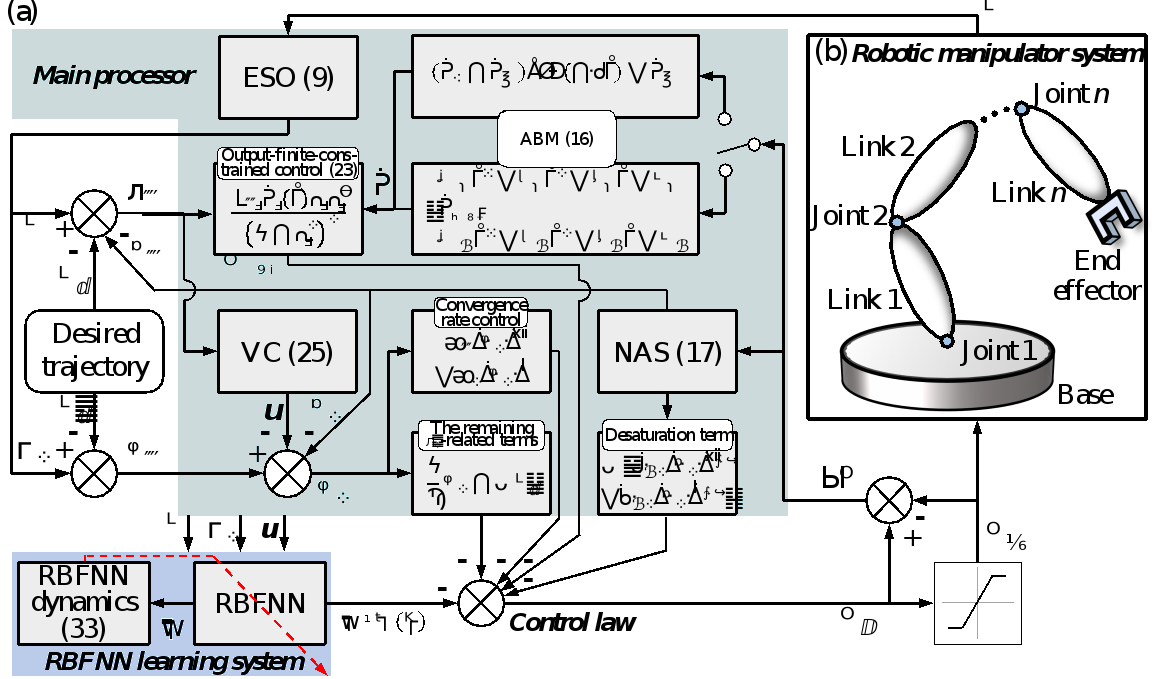
本文设计的闭环系统控制框图如下,而除上述主要贡献,本文在研究输入饱和下的机械臂动态跟踪与输出受限控制问题的同时,还设计了固定时间扩张观测器(FxT-ESO)代替系统速度测量,并采用了径向基函数神经网络(RBFNN)实现了对集总不确定的实时在线逼近。
本控制策略的主要特点如下:
首先,设计了一种顺应输入饱和的全局障碍李雅普诺夫函数及其输出有限约束控制框架,解决了现有BLF不适用的问题,且相比有界BLF,其在真实物理实验中的性能更好,而其理论设计严谨、公式结构简洁,能够直接推导出闭环系统最终的收敛紧集表达式。
![]()
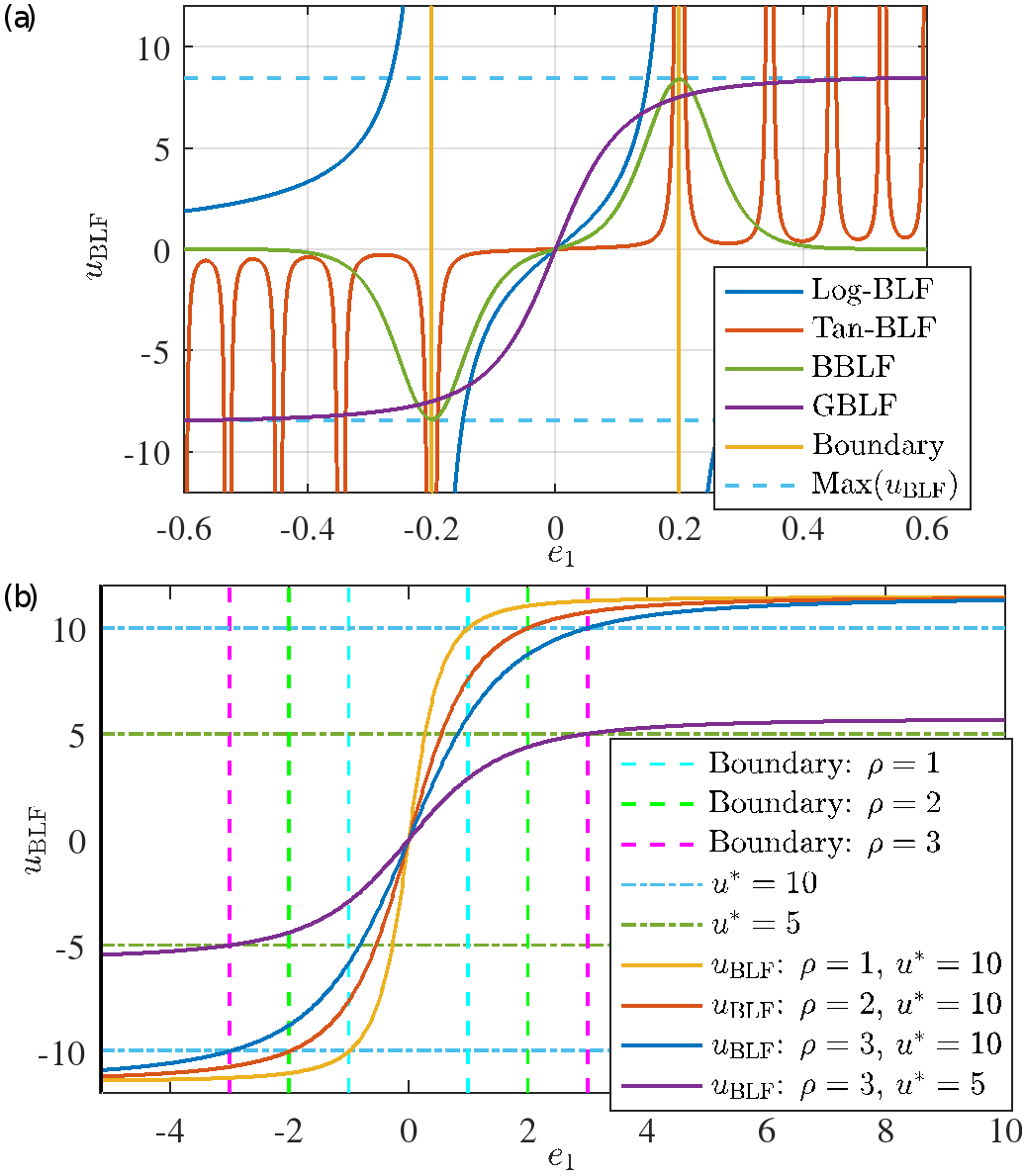
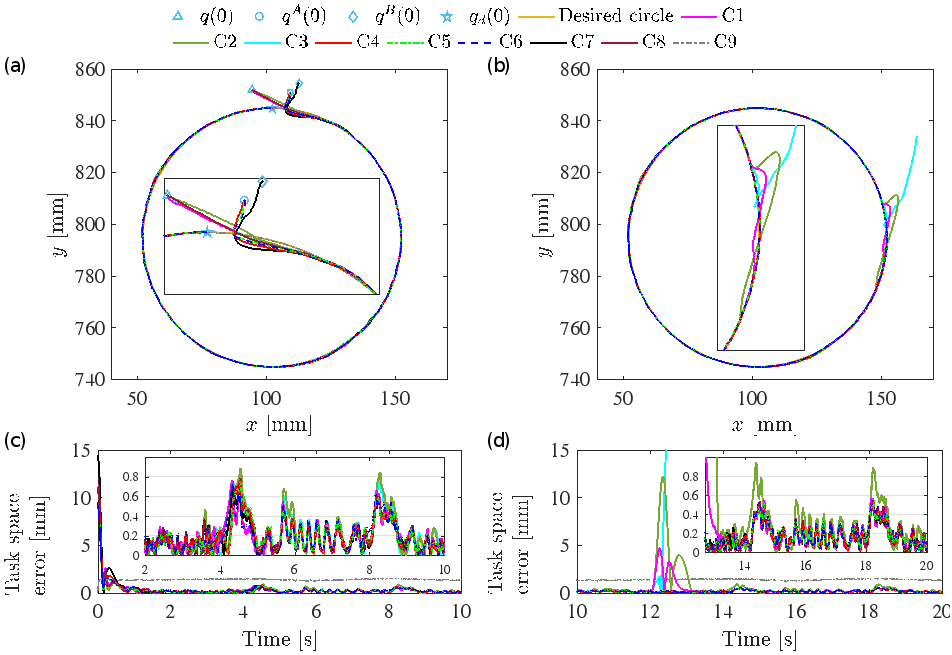
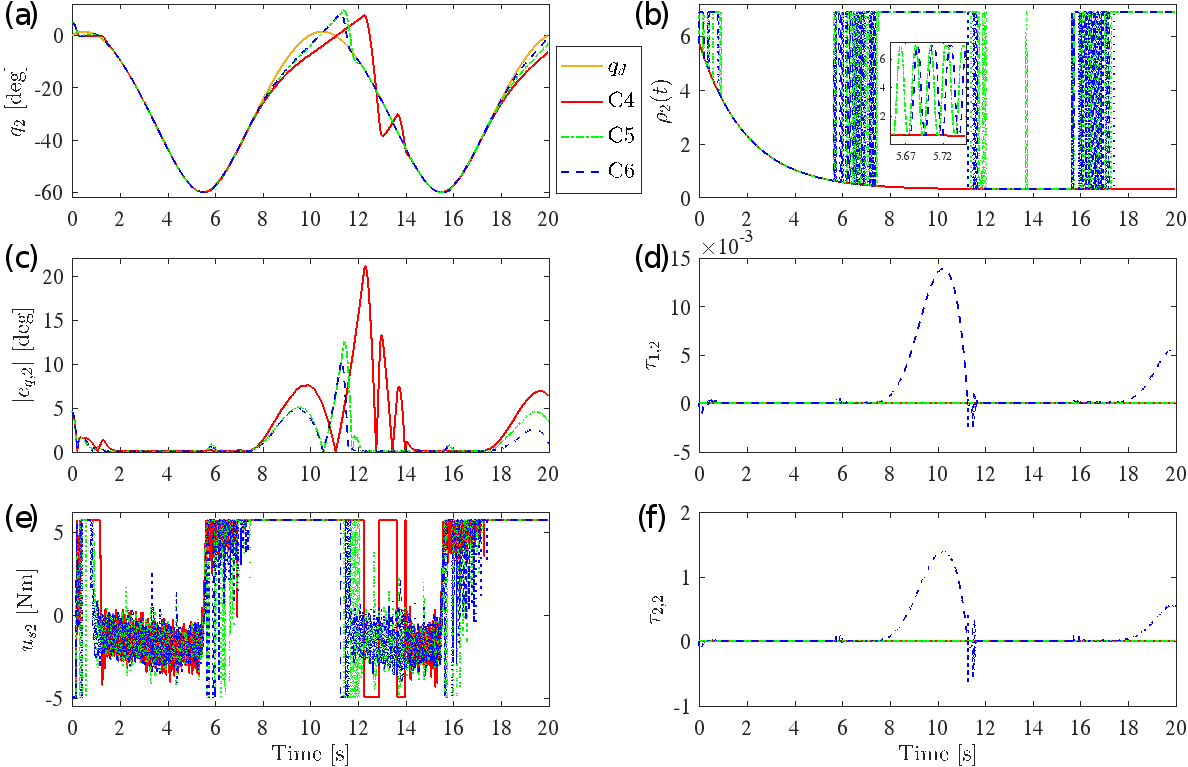
实验结果显示,设计的GBLF在极端干扰下展现出相比具有代表性的BLF算法明显更小的最大瞬态误差和更快的收敛速度。
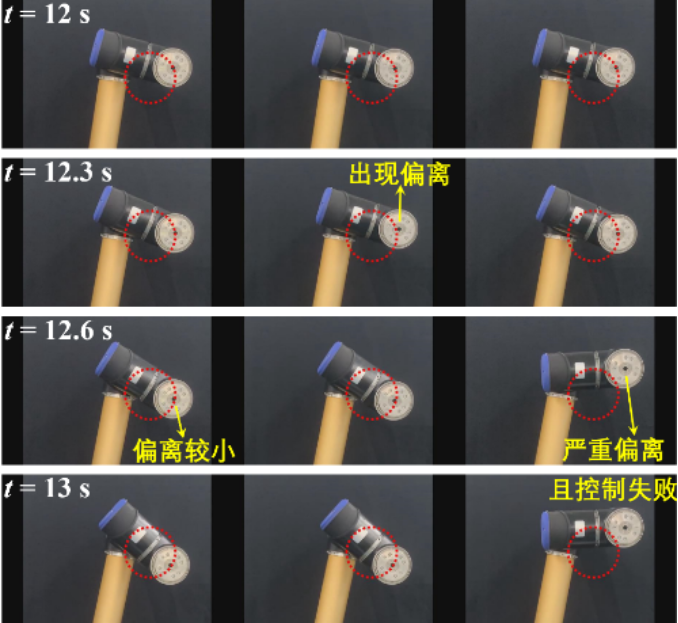
其次,设计的自适应边界模式(ABM)和新型的二阶辅助系统(NAS)共同构成了复合去饱和策略。ABM可调整边界使其放宽,进而使与GBLF关联的控制信号变小,达到去饱和的效果。NAS的状态变量连接了各阶子系统,同时,基于这些状态变量的补偿信号服务于虚拟和真实控制律,使整个控制框架设计更合理,此外,它还具有类似固定时间收敛特性。
![]()
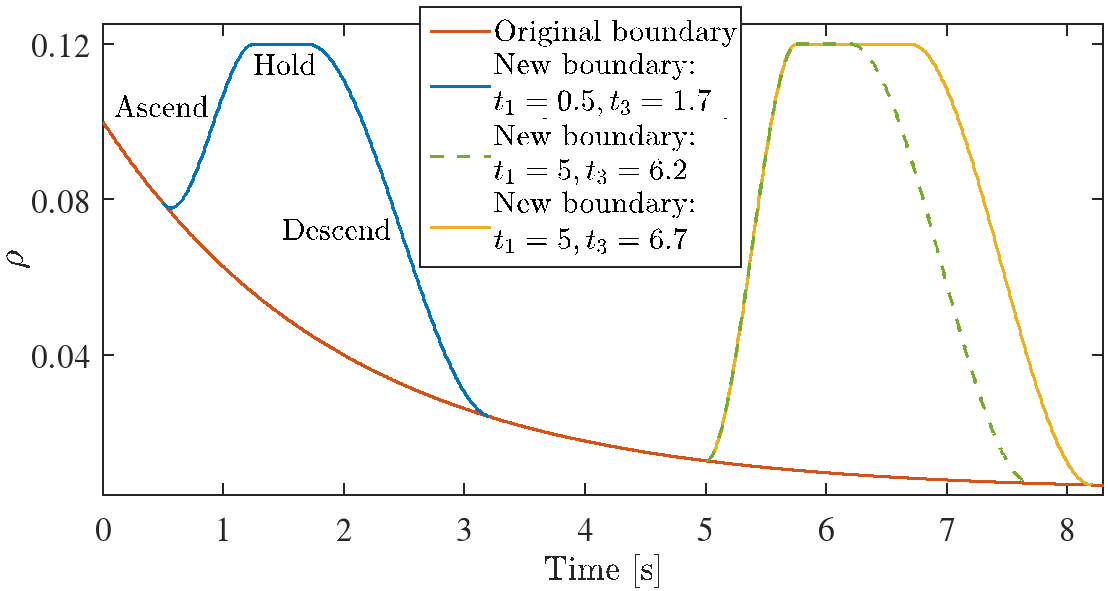
对比实验结果表明,复合去饱和策略的突出优势在于能够显著改善机械臂在极端饱和下的瞬态跟踪效果,并有效加快系统收敛速度。
最重要的,尽管所提的控制框架无法在理论层面达成固定时间稳定特性,但据调研结果,课题组在控制器设计过程中尽可能的避免了预先假设,使得在当前阶段仍达到了很好的实际控制表现,而未来也将致力于更全面深入的“固定时间+输入饱和”问题的研究,敬请关注。