用于机械臂无模型控制的门控循环学习算法:考虑输入饱和与输出受限
日期:2024-05-27 | 访问量:
针对RBF等神经网络在实时动力学控制中存在的问题与不足,课题组提出一种基于 Lyapunov稳定性理论的 Li-GRUNN 学习控制策略,并在Kollmorgen机械臂上通过实验验证了所提策略的有效性。相关成果在线发表于《IEEE Transactions on Industrial Electronics》。

作者信息:石青鑫博士生、温浩博士生、李长胜副教授、段星光教授
联系方式:sfijdl@bit.edu.cn、 3120185141@bit.edu.cn
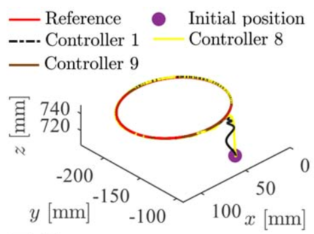
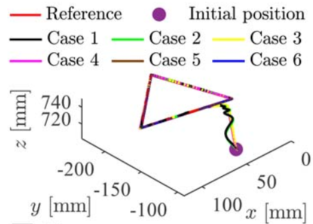
本文围绕机械臂动态跟踪与输出受限控制问题,设计了Li-GRUNN学习控制框架,解决了无模型且无速度测量情况下的机械臂精准控制。与依赖动力学模型的方法相比,该控制策略仅需要系统位置信号,在动力学完全未知、外部不确定/扰动存在、输入饱和发生的情况下具有较好的鲁棒性。

GRU的轻量化设计减轻了嵌入式系统计算负担,实现了网络权值的实时更新,确保了整个控制策略的实时性,而保留的GRU 双门控机制实现了对输入信息的有效处理,提升了网络的实时模拟表现。
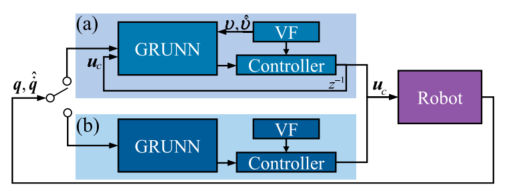
所设计的学习方式在不增加网络权值的同时使得网络能够充分感知闭环系统内的状态信号,从而进一步提升网络的实时模拟表现。此外,闭环系统的稳定性分析表明设计的指标误差、权值误差均满足PUUB。
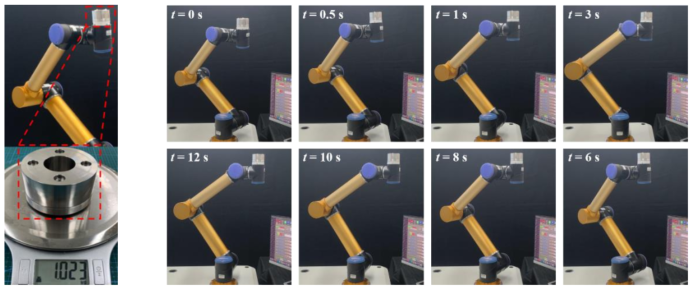
鲁棒性测试实验表明Li-GRUNN具有良好的实时模拟能力,体现出Li-GRUNN学习控制框架在动态跟踪控制中的优越性。另外,控制器能够将机械臂的实时状态有效地约束在预设的边界内,保证了系统在操作过程中的安全性。