
两级7自由度微型柔性并联手术执行器——面向微创经腔内镜手术的新型解决方案
微创经腔内镜手术能够在深部、狭窄的解剖腔道内完成病灶治疗,大幅减少组织损伤并加快患者康复。然而,现有内镜手术执行器在柔性化与微型化方面仍然存在瓶颈,难以在有限空间内同时兼顾高自由度、微小外径和安全操控。针对这一难题,研究团队提出了一种外径仅2 mm的两级7自由度柔性并联手术执行器,并在理论建模与动物实验中系统验证了其可行性。相关成果于2025年8月以“A Two-Segment 7-DOF Miniature Flexible Parallel Manipulator Towards Minimally Invasive Transluminal Endoscopic Surgery”为题,在线发表于中科院TOP期刊《IEEE/ASME TRANSACTIONS ON MECHATRONICS》。
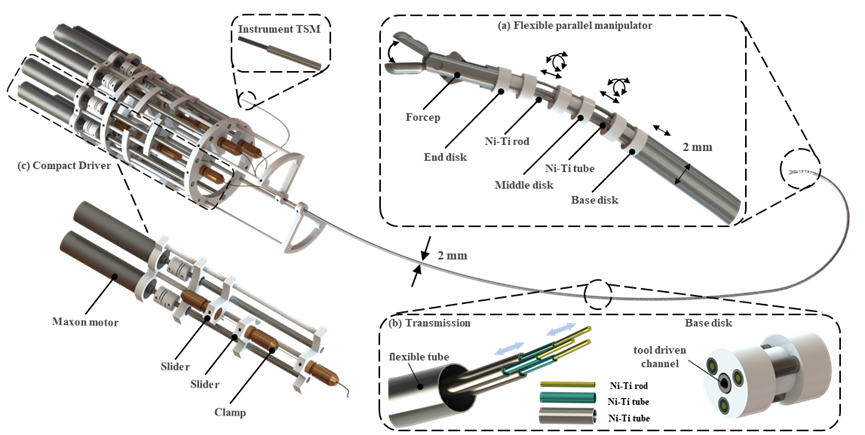
研究人员通过采用Ni-Ti超弹性丝/管替代传统关节,使其在微型化条件下仍具备良好的柔顺性和形变恢复能力。同时,手术执行器内部集成了直径0.6 mm的中空通道,可嵌入手术钳、激光器等临床常用器械,极大拓展了操作功能。在驱动方面,系统采用腱鞘传力机制,保证了远程精确操控和小型化结构的兼顾。基于螺旋理论建立了运动学与刚度模型,推导出可达工作空间、灵巧性指标及不同构型下的刚度特性,从而为临床应用提供了理论指导。
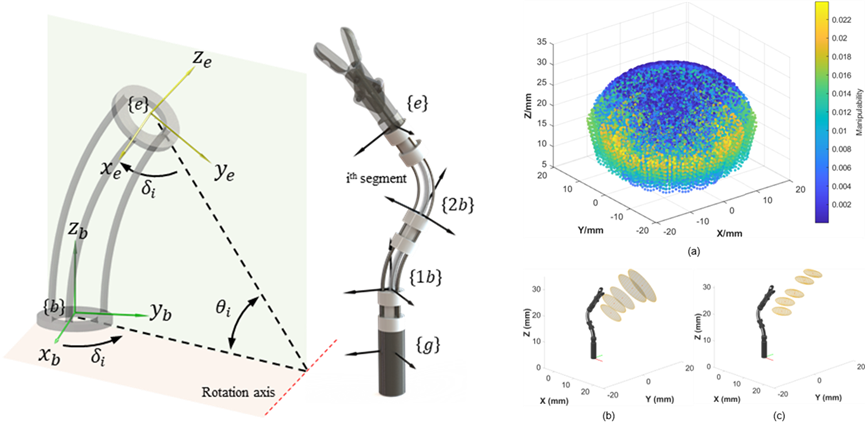
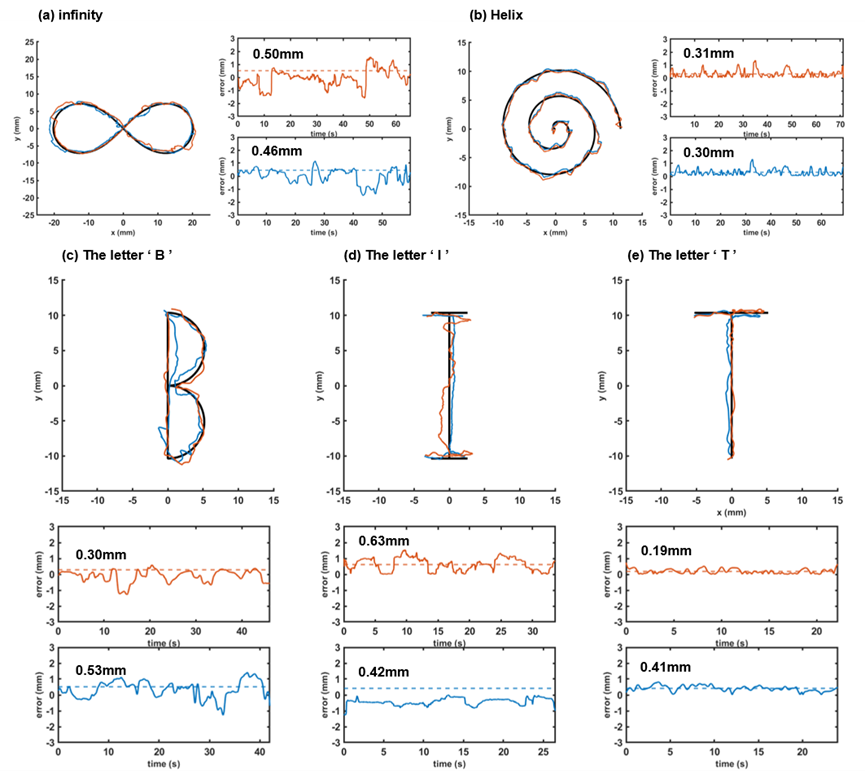
在实验验证中,通过仿真分析柔性并联手术执行器的可达工作空间范围超过20×20×30 mm³,足以覆盖呼吸道活检、鼻腔内镜等典型操作需求。主操操作精度实验表明,在五种典型轨迹测试中,平均误差始终保持在0.7 mm以内,充分证明了控制模型的高精度。
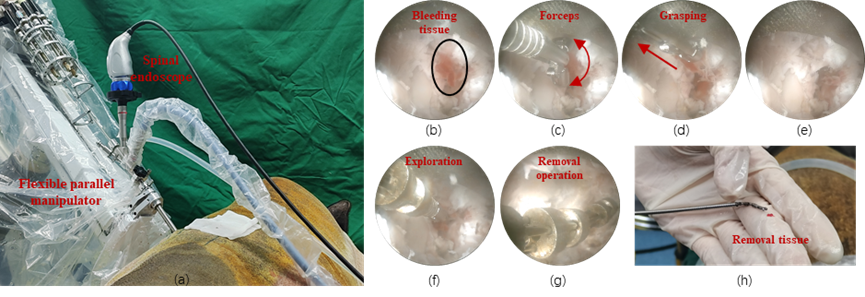
在巴马猪活体动物实验中,该手术执行器顺利完成了出血组织清除和剥离探查等操作,进一步验证了其在真实手术场景中的应用潜力。
本文提出的两级柔性并联手术执行器在“微型化”与“多自由度”之间实现了平衡与突破,为狭窄腔道中的安全操作提供了全新的技术路径。未来,该成果有望推广至呼吸道活检、耳鼻喉科及神经外科等更广泛的微创临床应用场景。